
PORTFOLIO
Master's Thesis: Improving Magnetic Map-Based Navigation using Vehicle Motion Information
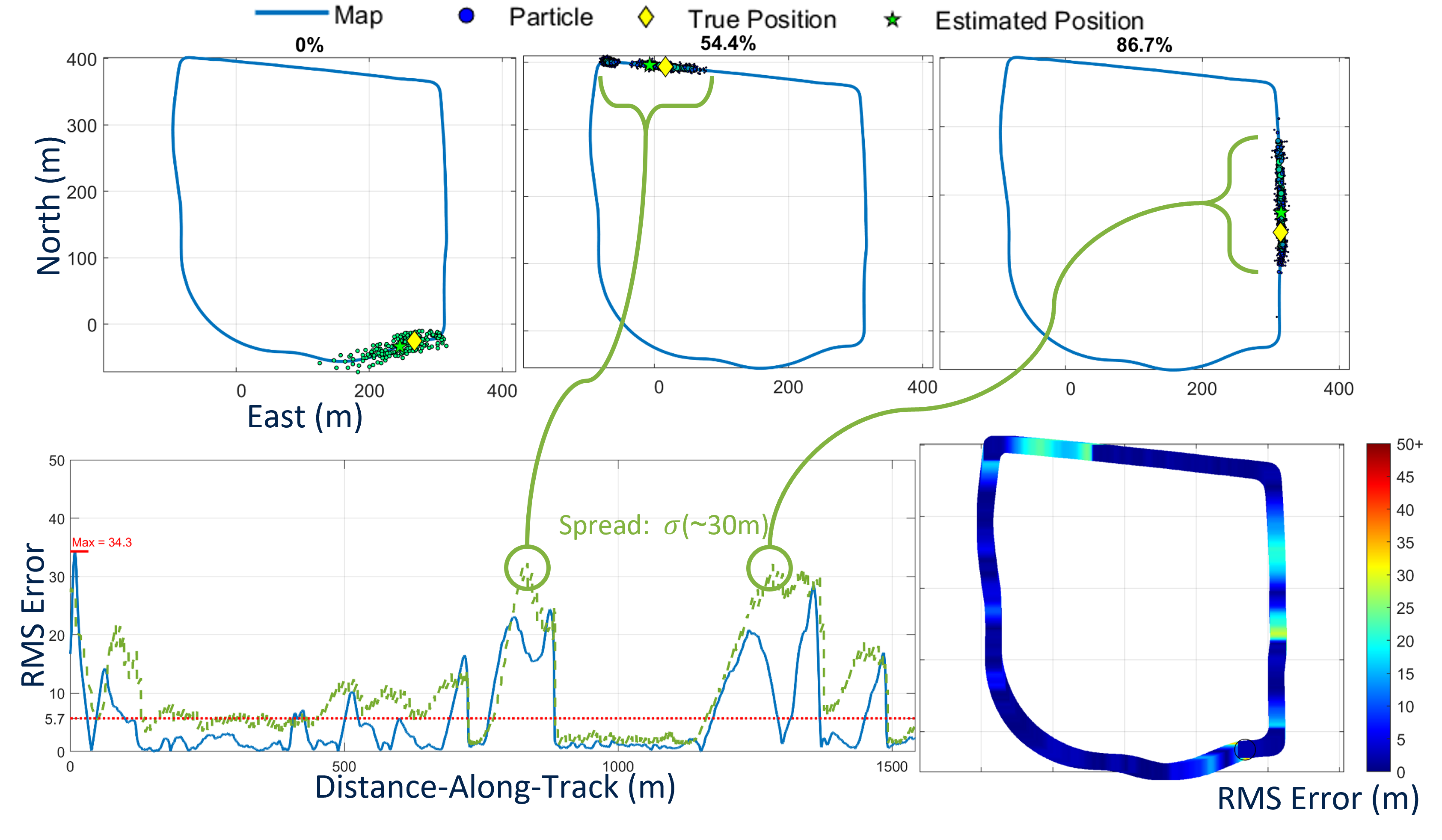
Lead author, integrator, and filter developer. Designed a particle filter to estimate vehicle location based on magnetic map-matching of measured data under the advisory of Dr. David Bevly. Presented on the particle-based magnetic localization technique at ION GNSS+ 2021.
C++PythonMATLABMagnetic NavigationSensor Fusion
Visit site